[2021년 01월 12일] - 자동화된 전 세계 자율주행 매핑 기능을 통해 올해 초 디트로이트, 도쿄, 상하이, 파리 및 뉴욕 시(규제로 보류 중)에서 모빌아이 자율주행이 진행형이다. 오는 2025년부터 자율주행차의 라이다 SoC 적용을 위해 인텔은 실리콘 포토닉스에 대한 자사 XPU 전략, 전문성 및 제조 역량을 제공해 개발에 비중을 높여 왔다. 모빌아이 기술을 활용한 차량, 매일 800만 킬로미터 이상, 전 세계 10억 킬로미터에 달하는 지도가 제작되면서 이의 속도는 탄력 받을 전망이다.
인텔 자회사 모빌아이(Mobileye)는 세계적으로 생명을 구한다(lifesaving)는 약속을 지키기 위한 자율주행차(AV) 전략과 기술을 CES 기간에 선보였다. 최고경영자(CEO) 암논 샤슈아(Amnon Shashua)는 두 차례의 세션을 통해 모빌아이가 세계 자율주행 업계를 선도하기 위해 어떠한 준비를 했는지 공개했다.

그는 “인텔의 지원과 우리의 세 가지 접근 방식은 모빌아이가 전례 없는 방식으로 확장할 수 있음을 의미한다” 며 “처음부터 우리는 계획의 모든 부분에서 지리적, 경제적 측면의 신속한 확장을 도모하고 있다. 발표 내용은 빌아이의 혁신이 어떻게 이러한 전략을 실행하도록 지원하는지를 보여준다”고 말했다.
모빌아이가 추구하는 세가지 접근법
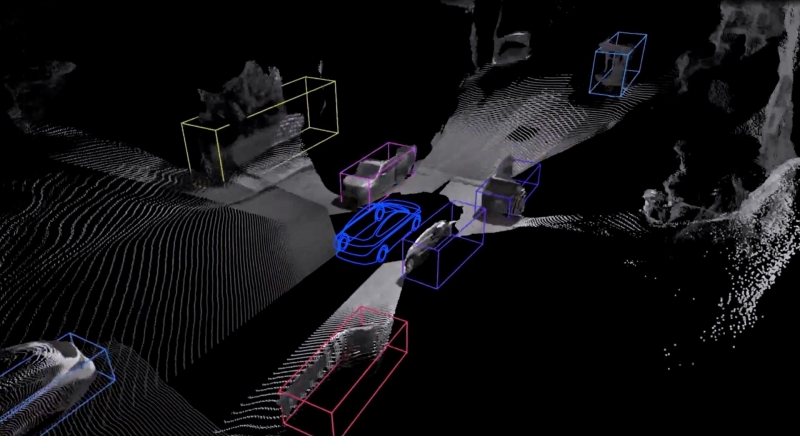
샤슈아 회장은 인간 운전자보다 훨씬 더 능력 있는 감지 솔루션 제공의 중요성을 설명했다. 핵심은 ▲도로 경험 관리(Road Experience Management, REM) 매핑 기술 ▲규칙 기반의 책임민감성안전(Responsibility-Sensitive Safety, RSS) 주행 정책 ▲세계 최고 수준의 카메라, 레이더 및 라이더 기술을 기반한 두 개의 개별 정밀 이중 안전화(Truly Redundant) 감지 보조 시스템으로 대표되는 모빌아이의 기술이 어떻게 결합하는가에 있다.

이들 시스템의 접근법은 기술 및 비즈니스적 관점 완벽하다는 평가를 받았다. 미래 자율주행차를 위해 시장에 맞춘 합리적인 가격으로 기술을 도입하는 것은 세계적 확장을 실현하는 데 매우 중요하다. 모빌아이의 솔루션은 주요 센서로 저렴한 카메라를 사용하며, 인간 운전자 보다 최소 천 배 더 안전한 2차 정밀 이중 안전화 감지 시스템과 결합해 안전 중요 성능을 구현했다. 개발사는 이러한 수준의 성능을 트루 리던던시(True Redundancy) 기능을 사용해 구현해냈고, 접합 시스템(fused system)보다 더 저렴한 비용과 빠른 속도를 내세웠다 .
신뢰도 높인 새로운 레이더 및 라이다 기술
샤슈아는 향상된 레이더와 라이더 감지를 달성해 도로 안전에 대한 기준을 더욱 높이는 데 핵심이 되는 자율주행차의 미래를 그리고 있음을 강조했다.
사슈아가 언더 더 후드(Under the Hood) 세션에서 밝힌 바와 같이, 2304개 채널, 100DB 다이내믹 레인지, 40DBc 사이드 로브 레벨을 갖춘 모빌아이의 소프트웨어 정의 이미징 레이더 (Software-defined imaging radar)기술은 레이더가 자율 주행을 지원하는 운전 규정을 충족하는 감지 수준을 구축한다. 완전히 디지털화된 최신 신호 처리, 다양한 스캔 모드, 풍부한 사물 감지 및 다중 프레임 트래킹 등으로, 모빌아이의 소프트웨어 정의 이미징 레이더는 큰 폭의 성능 도약을 위한 아키텍처 패러다임의 전환을 나타낸다.
또한 인텔의 특수 실리콘 포토닉스 팹(Fab)이 실리콘 칩에 능동 및 수동 레이저 소자를 배치하는 방법도 다뤘다. 오는 2025년 출시 예정인 라이다 SoC에 대해 “이는 진정한 게임 체인저”라며, “우리는 이를 포토닉 집적회로(PIC)라고 부른다. PIC 는 184개의 버티컬 라인을 가지고 있으며, 이 버티컬 라인은 광학 장치를 통해 움직인다. 이를 구현할 수 있는 팹을 가지는 것은 매우 드문 일이다. 이를 보유한 인텔은 라이다를 만드는 데 상당한 이점을 보유한 것”이라고 밝혔다.
자율주행차를 구현하기 위한 기반, 전 세계 지도
첫날 샤슈아는 모빌아이의 크라우드소싱 매핑 기술에 대해 설명했다. 독특하고 전례없는 기술은 매일 8백만 킬로미터, 지금까지 누적 10억 킬로미터를 주행하며 전 세계를 자동으로 매핑한다. 매핑 프로세스는 자율주행차의 핵심기능인 주변 환경을 이해하고 맥락화하는데 의미있는 것들에 관심을 기울인다는 점에서 다른 접근 방법들과는 차이를 보인다.

생명을 구한다는 약속을 실현하기 위해서는, 자율주행차가 보다 널리 보급되어야 하고 거의 모든 곳에서 운전할 수 있어야 한다고 강조햇다. 자동화된 맵 작성 프로세스는 모빌아이의 첨단 운전자 지원 기술을 이미 장착한 약 1백만 대의 차량에 배치된 기술을 활용에 수집된다.
개발사는 전문 엔지니어 동반 없이 자율주행차를 4곳의 새로운 도시에서 주행할 예정이다. 대신, 차량은 현지에 있는 모빌아이 고객 지원팀에게 전달될 예정이다. 안전을 위한 적절한 교육을 마치게 되면 해당 차량을 운전할 수 있다. 이 방식은 2020년 뮌헨과 디트로이트에서 자율주행차가 수일 내에 주행을 시작한 접근법과 동일하다.
By 김현동 에디터 hyundong.kim@weeklypost.kr
〈저작권자ⓒ 위클리포스트, 무단전재 및 재배포 금지〉
